三维投影是将三维空间中的点映射到二维平面上的方法。由于目前绝大多数图形数据的显示方式仍是二维的,因此三维投影的应用相当广泛,尤其是在计算机图形学,工程学和工程制图中。
- 三维图形平面投影
- 平行投影:投影中心与投影平面的距离是无限的,投影线相互平行
- 正投影(正交投影):投影线垂直于投影平面
- 多视图投影:物体的坐标面与投影面平行,正视图、侧视图、俯视图
- 轴测投影:物体的三个坐标面或坐标轴与投影面均不平行
- 正等轴测投影(正等测):投影时三个坐标轴等比例缩放,投影面坐标轴夹角120°
- 正二轴测投影(正二测):投影时两个坐标轴等比例缩放,第三个坐标轴缩放比例不同
- 正三轴测投影(正三测):投影时三个坐标轴缩放比例均不相等
- 斜投影:投影线不垂直于投影平面
- 斜等轴测投影(斜等测)
- 斜二轴测投影(斜二测)
- 斜三轴测投影(斜三测)
- 透视投影:投影中心与投影平面的距离是有限的
透视投影的定义更为复杂。可以将其理解为透过摄像机取景器对于被投影物体进行观察。摄像机的位置、朝向和视野都将影响投影变换的结果。我们定义以下变量来对这一变换进行描述:
 :将被投影的三维空间中的点。
:将被投影的三维空间中的点。 :摄像机的位置。
:摄像机的位置。 :摄像机的旋转角度。当 =<0,0,0>且 =<0,0,0>, 三维向量<1,2,0>将被投影到二维向量<1,2>。
:摄像机的旋转角度。当 =<0,0,0>且 =<0,0,0>, 三维向量<1,2,0>将被投影到二维向量<1,2>。 :观测者相对显示平面的位置。[1]
:观测者相对显示平面的位置。[1]
最终结果为:
 :
: 所产生的二维投影。
所产生的二维投影。
首先我们定义点 作为点 向摄像机坐标系所作的变换,其中摄像机坐标系由摄像机的位置
作为点 向摄像机坐标系所作的变换,其中摄像机坐标系由摄像机的位置 和旋转 所决定。该过程为:先用 减去 ,然后使用由
和旋转 所决定。该过程为:先用 减去 ,然后使用由 产生的旋转矩阵乘上该结果。该变换通常称为摄像机变换(注意该计算过程假设使用左手法则):
[2]
[3]
产生的旋转矩阵乘上该结果。该变换通常称为摄像机变换(注意该计算过程假设使用左手法则):
[2]
[3]
 [4]
[4]
或者使用以下这种非矩阵表示的形式,其中角度的正负号与矩阵表示形式不同:

然后将变换后的该点通过以下方程投影到二维平面(此处投影平面为x/y平面,有时也使用x/z):[5]

或在齐次坐标系下可以表示为:

和

观测者到显示平面的距离, ,直接关系到视野的大小。
,直接关系到视野的大小。 为可视角度。(这里假设屏幕的两角为(-1,-1)和(1,1))
为可视角度。(这里假设屏幕的两角为(-1,-1)和(1,1))
如果要在一些特定的显示设备上显示该二维平面,之后还要进行一些必要的剪裁和缩放操作。
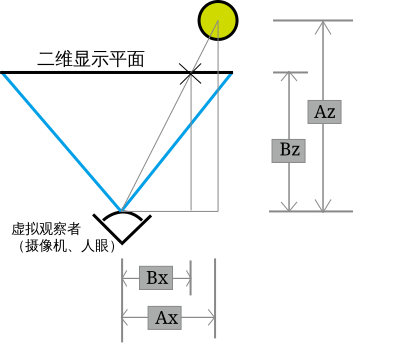
计算三维空间中位于Ax,Az的点在屏幕坐标x轴的位置:

对于y轴同样有:

(其中Ax和Ay是透视转换前物体在空间中的坐标)
- ^ Ingrid Carlbom, Joseph Paciorek, Planar Geometric Projections and Viewing Transformations, ACM Computing Surveys, 1978, 10 (4): 465–502, doi:10.1145/356744.356750 .
- ^ Riley, K F. Mathematical Methods for Physics and Engineering. Cambridge University Press. 2006: 931,942. ISBN 0521679710. doi:10.2277/0521679710.
- ^ Goldstein, Herbert. Classical Mechanics 2nd Edn.. Reading, Mass.: Addison-Wesley Pub. Co. 1980: 146–148. ISBN 0201029189.
- ^ Rotation About an Arbitrary Axis in 3 Dimensions (页面存档备份,存于互联网档案馆) Glenn Murray 2013-6-6 [2014-4-23]
- ^
Sonka, M; Hlavac, V; Boyle, R, Image Processing, Analysis & Machine Vision 2nd Edn., Chapman and Hall: 14, 1995, ISBN 0412455706








